menu
00

PIN
Reimagining soft robotics deployment for disaster response.
This project explores how soft robotics can assist in post-disaster search and rescue operations. Deployed from a carrier vehicle with retractable tracks, these robots are lightweight, flexible, and capable of adapting to unstable terrain. The system demonstrates how bio-inspired design and distributed deployment strategies can enhance future emergency response scenarios.
problem
Traditional post-disaster rescue efforts often struggle to reach survivors trapped in narrow, unstable spaces. Conventional robots and equipment are too rigid or bulky to navigate collapsed buildings, resulting in critical delays during time-sensitive operations.
solution
Explore adaptive, flexible rescue systems capable of crawling through tight, hazardous environments—enabling faster, safer, and more precise detection of trapped individuals in critical moments.
INSPIRATION
In September 2024, Hurricane Helen struck the southeastern U.S., killing over 200 people as floods and collapsed buildings blocked rescue access. It reminded me of past disasters like the Tangshan earthquake, where victims just meters away couldn't be reached. This soft robot was inspired by such scenarios—designed to crawl through tight, dangerous spaces to quickly and safely locate trapped individuals.

How might we reinvent rescue methods to reach trapped individuals more effectively in narrow, unstable, and life-threatening environments?
INSPIRATION
In September 2024, Hurricane Helen struck the southeastern U.S., killing over 200 people as floods and collapsed buildings blocked rescue access. It reminded me of past disasters like the Tangshan earthquake, where victims just meters away couldn't be reached. This soft robot was inspired by such scenarios—designed to crawl through tight, dangerous spaces to quickly and safely locate trapped individuals.
How might we reinvent rescue methods to reach trapped individuals more effectively in narrow, unstable, and life-threatening environments?
INSPIRATION
In September 2024, Hurricane Helen struck the southeastern U.S., killing over 200 people as floods and collapsed buildings blocked rescue access. It reminded me of past disasters like the Tangshan earthquake, where victims just meters away couldn't be reached. This soft robot was inspired by such scenarios—designed to crawl through tight, dangerous spaces to quickly and safely locate trapped individuals.
How might we reinvent rescue methods to reach trapped individuals more effectively in narrow, unstable, and life-threatening environments?
INSPIRATION
In September 2024, Hurricane Helen struck the southeastern U.S., killing over 200 people as floods and collapsed buildings blocked rescue access. It reminded me of past disasters like the Tangshan earthquake, where victims just meters away couldn't be reached. This soft robot was inspired by such scenarios—designed to crawl through tight, dangerous spaces to quickly and safely locate trapped individuals.
How might we reinvent rescue methods to reach trapped individuals more effectively in narrow, unstable, and life-threatening environments?
year
Sep - Dec 2024
year
Sep - Dec 2024
year
Sep - Dec 2024
year
Sep - Dec 2024
timeframe
14 weeks
timeframe
14 weeks
timeframe
14 weeks
timeframe
14 weeks
tools
Soft Robotics | Disaster Response | Search & Rescue Innovation | Ardurino
tools
Soft Robotics | Disaster Response | Search & Rescue Innovation | Ardurino
tools
Soft Robotics | Disaster Response | Search & Rescue Innovation | Ardurino
tools
Soft Robotics | Disaster Response | Search & Rescue Innovation | Ardurino
category
Personal Project
category
Personal Project
category
Personal Project
category
Personal Project
01 RESEARCH
SOFT ROBOT ANALYSIS
Balancing flexibility, mobility, weight, and structural adaptability, the Harvard thermal crawler shows the most well-rounded performance across six key attributes—making it a strong reference model for post-disaster rescue.
SOFT ROBOT ANALYSIS
Balancing flexibility, mobility, weight, and structural adaptability, the Harvard thermal crawler shows the most well-rounded performance across six key attributes—making it a strong reference model for post-disaster rescue.
SOFT ROBOT ANALYSIS
Balancing flexibility, mobility, weight, and structural adaptability, the Harvard thermal crawler shows the most well-rounded performance across six key attributes—making it a strong reference model for post-disaster rescue.
SOFT ROBOT ANALYSIS
Balancing flexibility, mobility, weight, and structural adaptability, the Harvard thermal crawler shows the most well-rounded performance across six key attributes—making it a strong reference model for post-disaster rescue.

Current Rescue Stages
In disasters like earthquakes where buildings collapse, the golden window for rescue is extremely short. Many survivors are trapped deep within the rubble and lose their chance of survival due to delayed rescue. Therefore, rapidly locating and reaching survivors is critically important.
Current Rescue Stages
In disasters like earthquakes where buildings collapse, the golden window for rescue is extremely short. Many survivors are trapped deep within the rubble and lose their chance of survival due to delayed rescue. Therefore, rapidly locating and reaching survivors is critically important.
Current Rescue Stages
In disasters like earthquakes where buildings collapse, the golden window for rescue is extremely short. Many survivors are trapped deep within the rubble and lose their chance of survival due to delayed rescue. Therefore, rapidly locating and reaching survivors is critically important.
Current Rescue Stages
In disasters like earthquakes where buildings collapse, the golden window for rescue is extremely short. Many survivors are trapped deep within the rubble and lose their chance of survival due to delayed rescue. Therefore, rapidly locating and reaching survivors is critically important.

Ideal Rescue Method
Soft robots, with their lightweight, deformable, low-disturbance, and highly adaptive nature, precisely fill the gap left by conventional rescue methods in navigating tight spaces and reaching deep targets.
Ideal Rescue Method
Soft robots, with their lightweight, deformable, low-disturbance, and highly adaptive nature, precisely fill the gap left by conventional rescue methods in navigating tight spaces and reaching deep targets.
Ideal Rescue Method
Soft robots, with their lightweight, deformable, low-disturbance, and highly adaptive nature, precisely fill the gap left by conventional rescue methods in navigating tight spaces and reaching deep targets.
Ideal Rescue Method
Soft robots, with their lightweight, deformable, low-disturbance, and highly adaptive nature, precisely fill the gap left by conventional rescue methods in navigating tight spaces and reaching deep targets.

Interview
In post-disaster rescue, it's often difficult to access narrow or unstable spaces. To better understand real concerns and experiences, I interviewed rescue volunteers, disaster medical experts, and earthquake survivors.
Interview
In post-disaster rescue, it's often difficult to access narrow or unstable spaces. To better understand real concerns and experiences, I interviewed rescue volunteers, disaster medical experts, and earthquake survivors.
Interview
In post-disaster rescue, it's often difficult to access narrow or unstable spaces. To better understand real concerns and experiences, I interviewed rescue volunteers, disaster medical experts, and earthquake survivors.
Interview
In post-disaster rescue, it's often difficult to access narrow or unstable spaces. To better understand real concerns and experiences, I interviewed rescue volunteers, disaster medical experts, and earthquake survivors.

What lies beneath the rubble
Studying the structural patterns formed by different types of disasters helps inform the design of rescue equipment and movement strategies, improving both efficiency and safety in diverse collapse scenarios.
What lies beneath the rubble
Studying the structural patterns formed by different types of disasters helps inform the design of rescue equipment and movement strategies, improving both efficiency and safety in diverse collapse scenarios.
What lies beneath the rubble
Studying the structural patterns formed by different types of disasters helps inform the design of rescue equipment and movement strategies, improving both efficiency and safety in diverse collapse scenarios.
What lies beneath the rubble
Studying the structural patterns formed by different types of disasters helps inform the design of rescue equipment and movement strategies, improving both efficiency and safety in diverse collapse scenarios.

02 RESEARCH OF PROTOTYPE
SOFT ROBOT ANALYSIS
Balancing flexibility, mobility, weight, and structural adaptability, the Harvard thermal crawler shows the most well-rounded performance across six key attributes—making it a strong reference model for post-disaster rescue.
SOFT ROBOT ANALYSIS
Balancing flexibility, mobility, weight, and structural adaptability, the Harvard thermal crawler shows the most well-rounded performance across six key attributes—making it a strong reference model for post-disaster rescue.
SOFT ROBOT ANALYSIS
Balancing flexibility, mobility, weight, and structural adaptability, the Harvard thermal crawler shows the most well-rounded performance across six key attributes—making it a strong reference model for post-disaster rescue.
SOFT ROBOT ANALYSIS
Balancing flexibility, mobility, weight, and structural adaptability, the Harvard thermal crawler shows the most well-rounded performance across six key attributes—making it a strong reference model for post-disaster rescue.

Locomotion Strategy Exploration
I studied its locomotion patterns in depth and identified two key movement modes that became essential references for my own design.
Locomotion Strategy Exploration
I studied its locomotion patterns in depth and identified two key movement modes that became essential references for my own design.
Locomotion Strategy Exploration
I studied its locomotion patterns in depth and identified two key movement modes that became essential references for my own design.
Locomotion Strategy Exploration
I studied its locomotion patterns in depth and identified two key movement modes that became essential references for my own design.

03 IDEATION
Design Aim
Design a soft robot system that can navigate rubble with minimal disturbance, avoid secondary injuries, and improve overall rescue efficiency.
RESCUE PROCESS
Design Aim
Design a soft robot system that can navigate rubble with minimal disturbance, avoid secondary injuries, and improve overall rescue efficiency.
RESCUE PROCESS
Design Aim
Design a soft robot system that can navigate rubble with minimal disturbance, avoid secondary injuries, and improve overall rescue efficiency.
RESCUE PROCESS
Design Aim
Design a soft robot system that can navigate rubble with minimal disturbance, avoid secondary injuries, and improve overall rescue efficiency.
RESCUE PROCESS

KEY FEATURES in RESCUE PHASE
KEY FEATURES in RESCUE PHASE
KEY FEATURES in RESCUE PHASE
KEY FEATURES in RESCUE PHASE

04 DESIGN
Material in experiment
Material in experiment
Material in experiment
Material in experiment

Process
This process not only realizes the entire making process from design to production of soft robots, but also systematically evaluates the impact of different sizes and structures on their pneumatic performance and crawling ability.
Process
This process not only realizes the entire making process from design to production of soft robots, but also systematically evaluates the impact of different sizes and structures on their pneumatic performance and crawling ability.
Process
This process not only realizes the entire making process from design to production of soft robots, but also systematically evaluates the impact of different sizes and structures on their pneumatic performance and crawling ability.
Process
This process not only realizes the entire making process from design to production of soft robots, but also systematically evaluates the impact of different sizes and structures on their pneumatic performance and crawling ability.

Problem that facing
Problem that facing
Problem that facing
Problem that facing

Connection method
Connection method
Connection method
Connection method

CODE
CODE
CODE
CODE

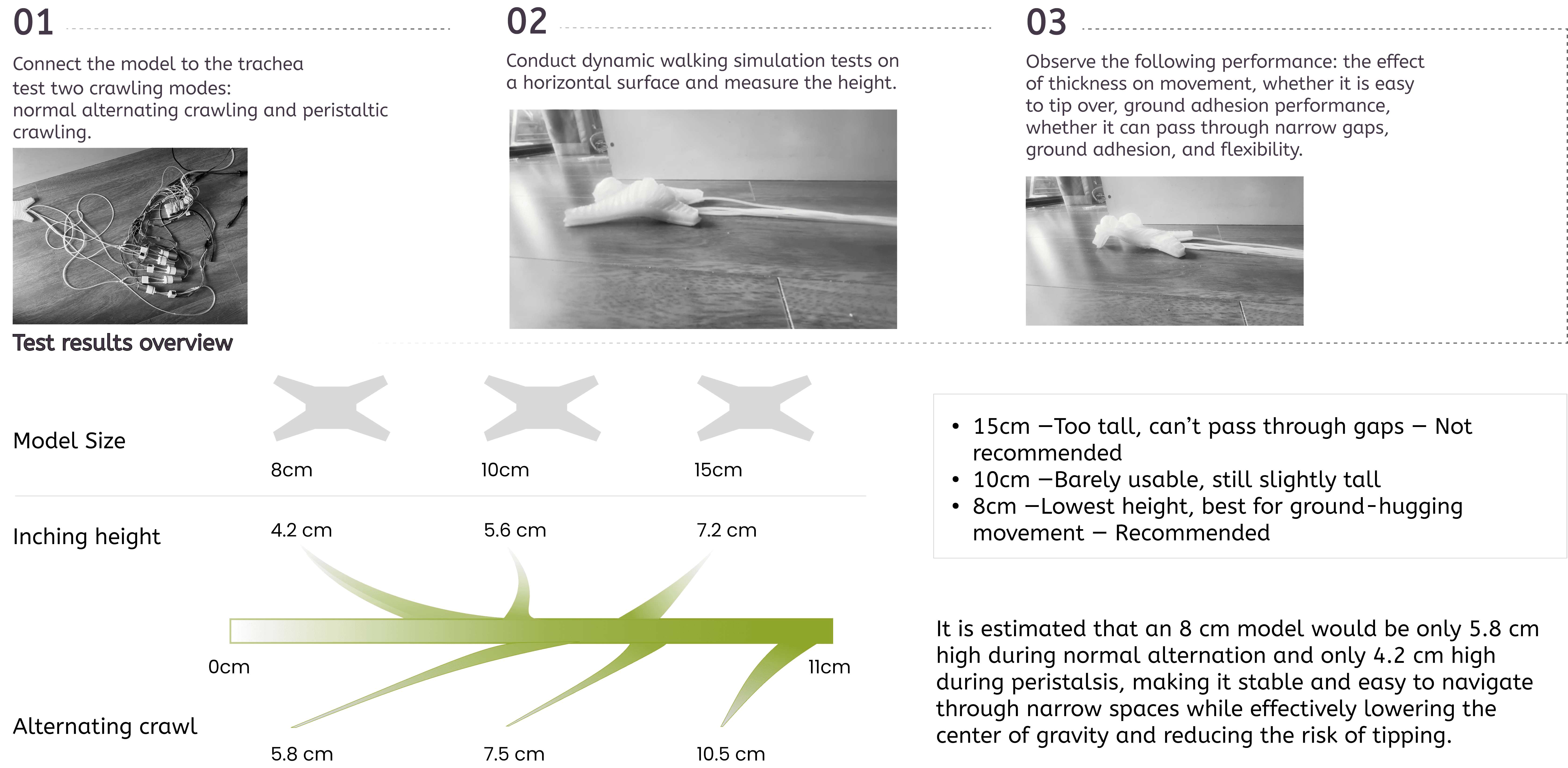
Test A - Mode 1& Mode 2 Functional Movement Test
Test B - Mode 1& Mode 2 Functional Movement Test
Test A - Mode 1& Mode 2 Functional Movement Test
Test B - Mode 1& Mode 2 Functional Movement Test
Test A - Mode 1& Mode 2 Functional Movement Test
Test B - Mode 1& Mode 2 Functional Movement Test
Test A - Mode 1& Mode 2 Functional Movement Test
Test B - Mode 1& Mode 2 Functional Movement Test
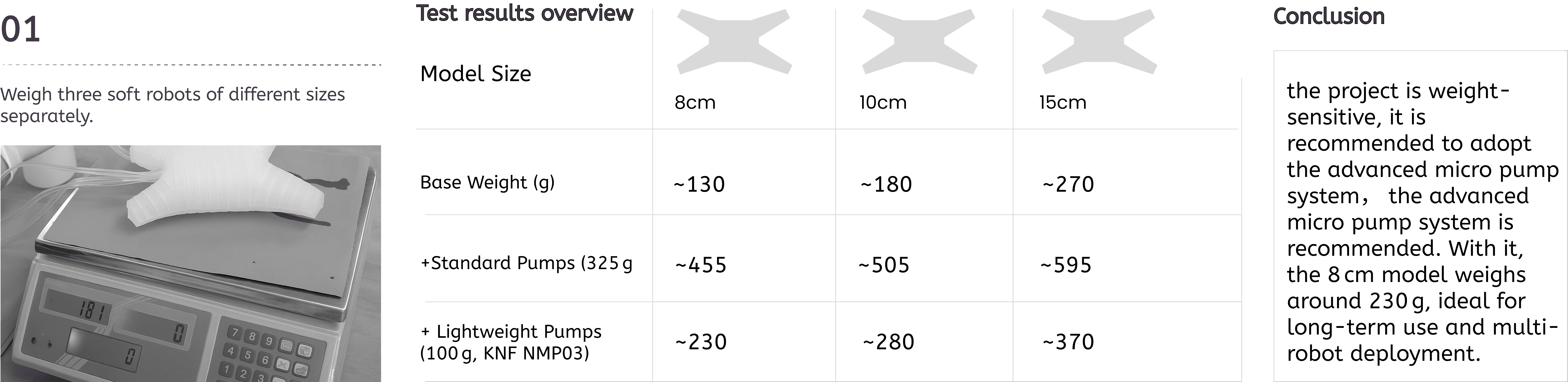
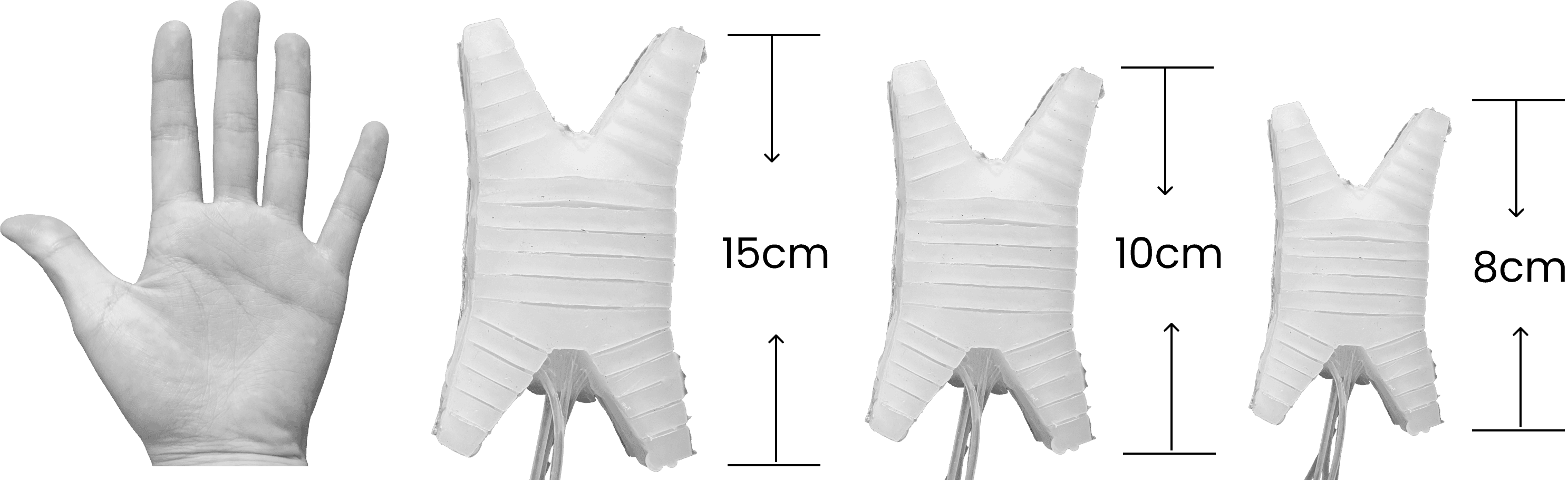
Size of testing soft robot
Measurement Standards
Max height < 8 cm (80 mm): meets confined space standard
Must support body and crawl forward
Must remain stable on uneven surfaces
Same material used — isolates structural difference only
Size of testing soft robot
Measurement Standards
Max height < 8 cm (80 mm): meets confined space standard
Must support body and crawl forward
Must remain stable on uneven surfaces
Same material used — isolates structural difference only
Size of testing soft robot
Measurement Standards
Max height < 8 cm (80 mm): meets confined space standard
Must support body and crawl forward
Must remain stable on uneven surfaces
Same material used — isolates structural difference only
Size of testing soft robot
Measurement Standards
Max height < 8 cm (80 mm): meets confined space standard
Must support body and crawl forward
Must remain stable on uneven surfaces
Same material used — isolates structural difference only
see also



.say hello
I’m currently exploring new opportunities for collaboration — whether in research, design, or creative practice
.say hello
I’m currently exploring new opportunities for collaboration — whether in research, design, or creative practice
.say hello
I’m currently exploring new opportunities for collaboration — whether in research, design, or creative practice
.say hello